Cams come in all shapes and sizes and are found in most branches of engineering. Indeed without them many of our everyday appliances would not work. Simple cams form the basis of rotary cam timers which are used to control some household appliances, car engine would not work without the cams and many industrial machine tools rely upon them. In truth cams are ubiquitous.
Types Of Cams
A Cam is a reciprocating, oscillating or rotating body which imparts reciprocating or oscillating motion to a second body, called the follower, with which it is in contact. The shape of the cam depends upon its own motion, the required motion of the follower and the shape of the contact face of the follower.
Oscillating motion is linear motion that alternates backward and forward. Linear motion is a motion along a straight line path, such as a bicycle.
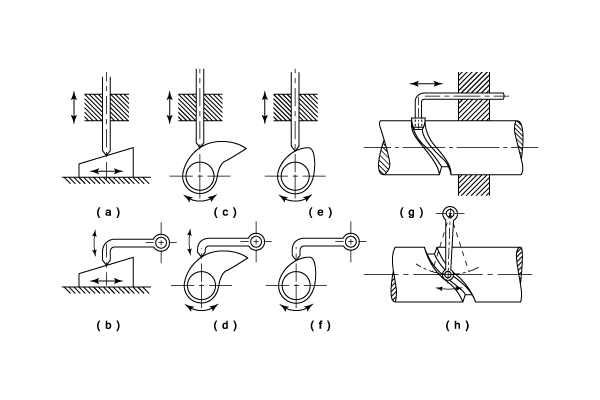
Of the many types of cam, a few of the most common are shown in the diagram.
In general the motion of the follower is only determined positively by the cam during a part of each stroke whilst during the remainder of the stroke contact between the cam and the follower has to be maintained by an external force, often supplied by a spring. In this connection it should be noticed that the cam does not, as would at first appear likely, determine the motion of the follower during the whole of the its out-stroke. Actually, owing to the inertia of the follower, it is only during the first part of the out-stroke and the latter part of the return that the motion of the follower is positively controlled by the cam.
Cams are classified according to the direction of displacement of the follower with respect to the axis or oscillation of the cam. The two most important types are :
Disc or Radial Cams In these the working surface of the cam is shaped that the reciprocation or oscillation of the follower is in a plane at right angles to the axis of the cam. ( see examples c; d; e; f above )
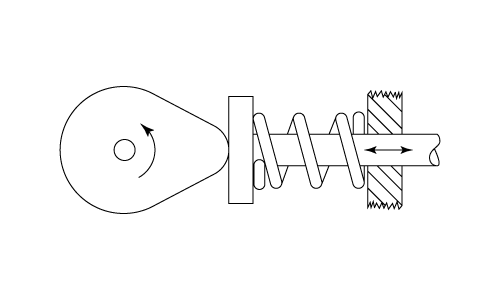
Cylindrical Cams These are often used in machine- tools and the cam imparts an oscillation or reciprocation to the follower in a plane parallel to the axis of the cam. ( see examples g and h above)
Types Of Follower.
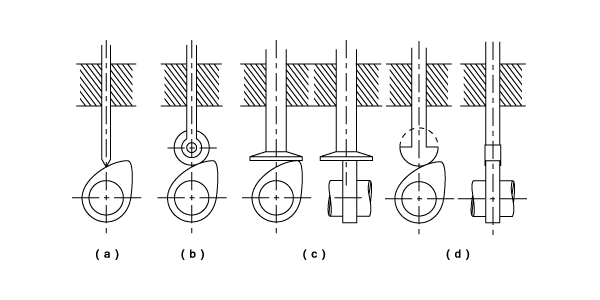
Followers can be divided according to the shape of that part which is in contact with the cam.. The following diagram shows some of the more common types:
Knife edged. These are not often used due to the rapid rate of wear of the knife edge. This design produces a considerable side thrust between the follower and the guide.
Roller Follower. The roller follower has the advantage that the sliding motion between cam and follower is largely replaced by a rolling motion. Note that sliding is not entirely eliminated since the inertia of the roller prevents it from responding instantaneously to the change of angular velocity required by the varying peripheral speed of the cam. This type of follower also produces a considerable side thrust.
Flat or Mushroom Follower. These have the advantage that the only side thrust is that due to friction between the contact surfaces of cam and follower. The relative motion is one of sliding but it may be possible to reduce this by off setting the axis of the follower as shown in the diagram. This results in the the follower revolving under the influence of the cam.
Flat faced Follower. These are really an example of the mushroom follower and are used where space is limited. The most obvious example being automobile engines.
Limits imposed on the shape of the cam working surface by the choice of follower type.
The knife follower does not, theoretically, impose any limit on the shape of the cam.
The roller follower demands that any concave portion of the working surface must have a radius at least equal to the radius of the roller.
The flat follower requires that everywhere the surface of the cam is convex.
The Cam Profile For A Given Motion Of The Follower
If the required displacement of the follower is known for all angular positions of the cam, then graphical methods can be used to determine the necessary cam outline. The method of work is as follows:
Select the minimum cam radius i.e. zero displacement of the follower.
Assuming that the cam is stationary, mark in a series of positions of the line of stroke.
From a knowledge of the displacements in each of these positions and allowing for the type of follower to be used, it is possible to draw the required profile of the cam (See Examples 2 and 3).
Two particular motions of the follower are frequently specified. These are:
Acceleration is the rate of change of velocity over time. In one dimension, acceleration is the rate at which something speeds up or slows down.Since velocity is a vector, acceleration describes the rate of change of both the magnitude and the direction of velocity.
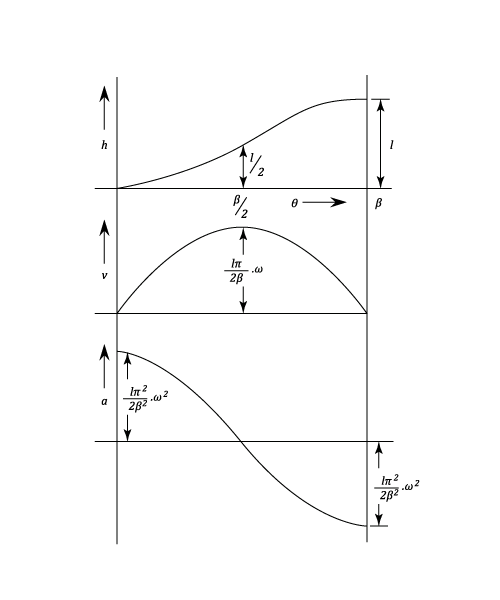
Simple Harmonic Motion
If l is the follower lift which is to take place during a cam rotation of , then the displacement at any cam angle is given by:
Differentiating with respect to time, The velocity of the Follower,
(where The angular velocity of the cam)
From which the maximum velocity is given by
Differentiating equation (1), The acceleration of follower,
The maximum acceleration of follower
The following graph shows the displacement velocity and acceleration of the follower over one revolution of the cam.
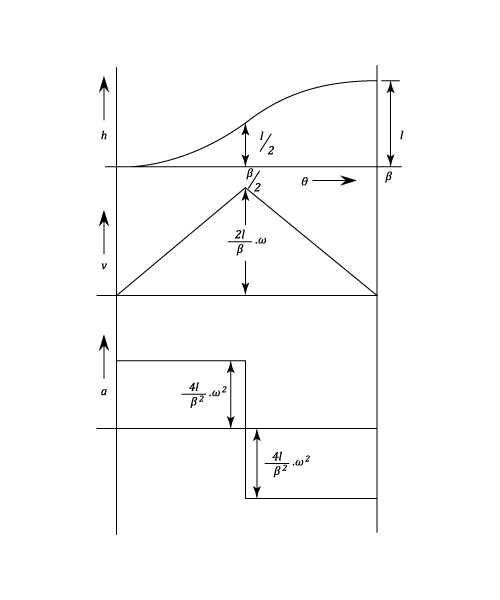
Uniform Acceleration And Retardation
If these are also made equal, the result is to keep the inertia forces to a minimum for a given lift in a given time.
If a is the uniform acceleration then:
And,
If the acceleration and retardation are numerically equal and if is the angle of lift, then when and then,
or . Thus, (Which is a Parabola)
And the maximum velocity
The Motion Of The Follower From A Given Cam Profile
The motion imparted to the follower by a given cam profile may be determined graphically using the reverse process that was described in the last paragraph. (see Example 1)
Certain standard shapes of cams which are made up of circular arcs and straight lines may be dealt with analytically. This is done by obtaining expressions for the displacement in terms of the cam angle and differentiating for the velocity and acceleration. ( see Examples 6 and 7)
The Equivalent Mechanism For A Cam And Follower
In many cases an equivalent mechanism using lower pairs can be substituted for a given cam and follower, possibly only over a limited range of stroke. If this is done the method of determining the velocity and acceleration which has been described in "Theory of machines, Velocity and acceleration" can be used. A Cam whose profile is made up of circular arcs and tangents is usually amenable to this treatment. The resulting mechanism varies with the type of follower.
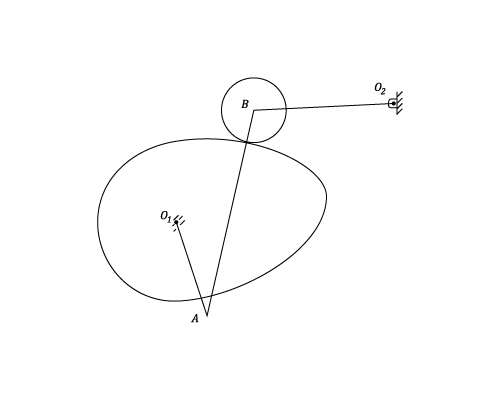
When a roller follower is used, a constant distance is maintained between the centre of the roller and the centre of curvature of the cam profile. This can be replaced by a rigid link. If the follower reciprocates (see worked examples) then an equivalent slider crank chain is produced. If the follower oscillates as in the following diagram,
then the motion is equivalent to a four bar chain connecting the centres of cam axis, profile curvature, roller, and follower axis.
A flat footed oscillating follower can usually be replaced by a slotted lever ( See Example 4).
Example:
[imperial]
Example - Example 1
Problem
The Cam shown in the diagram rotates about at a uniform speed of 500 r.p.m. and operates a follower attached to a roller of centre . The path of is a straight line passing through .
Draw the time lift diagram for the roller centre on a base of 1 inch to 0,01 seconds and to a vertical scale four times full size, for a movement of from the position shown; determine the maximum velocity of the roller centre and the cam angle at which it occurs.
Workings
Leaving the cam "stationary" draw a series of radial lines at equal angles of from the position at which lift starts.
The points are such that circles of the roller radius , with these points as centres, just touch the cam. Note the point of contact is not in general on the line of stroke.
Thus = lift + Minimum Cam Radius + Roller Radius
The construction of the required time lift diagram is as follows:
Two horizontal bases are set out at a distance apart equal to the minimum cam radius + roller radius ( the scale of this diagram is twice that of the cam itself.
Mark off verticals from the lower base line equal to at cam angles of These give the points on the displacement time diagram
The slope of this graph is proportional to the velocity and hence the maximum velocity occurs at a cam angle of and by drawing the tangent at this point its magnitude is found to be



, then the displacement at any cam angle
is given by:
Differentiating with respect to time, The velocity of the Follower, (whereThe angular velocity of the cam) From which the maximum velocity is given by
Differentiating equation (1), The acceleration of follower,
The maximum acceleration of follower
The following graph shows the displacement velocity and acceleration of the follower over one revolution of the cam.

And, If the acceleration and retardation are numerically equal and if
and
then,
or
. Thus,
(Which is a Parabola) And the maximum velocity

 at a uniform speed of 500 r.p.m. and operates a follower attached to a roller of centre
at a uniform speed of 500 r.p.m. and operates a follower attached to a roller of centre  . The path of
. The path of  is a straight line passing through
is a straight line passing through 
 from the position shown; determine the maximum velocity of the roller centre
from the position shown; determine the maximum velocity of the roller centre 
at equal angles of
from the position at which lift starts.

are such that circles of the roller radius , with these points as centres, just touch the cam. Note the point of contact is not in general on the line of stroke.
= lift + Minimum Cam Radius + Roller Radius
at cam angles of
These give the points on the displacement time diagram

and by drawing the tangent at this point its magnitude is found to be