The Theory of Machines is concerned with the Motion of parts of machines and the forces which act on those parts. In most cases these forces are not constant and their calculation demands that we know the velocities and accelerations which occur in the various components.
The concept of Instantaneous Centres of Velocity was covered in the section on Mechanisms. In this section the Analysis of Velocity and Acceleration are considered with particular reference to Cranks and Pistons. Klien's Construction for Piston Acceleration is introduced and a description of the Coriolis Component is given.
Analysis Of Velocity And Accelerations Components
Velocity
In the diagram the point moves in the plane . The length and the .
Velocity is the measurement of the rate and direction of change in the position of an object. It is a vector physical quantity; both magnitude and direction are required to define it.
And using equations (1) and (2)
Which is the rate of increase of
The tangential component of velocity (i.e. Perpendicular to in the direction of increasing)
Where = angular velocity of
Acceleration
Acceleration is the time rate of change of velocity with respect to magnitude or direction; the derivative of velocity with respect to time.
is the centripetal acceleration due to the rotation of
is due to the change in angular velocity.
is called the compound supplementary acceleration or Coriolis Component. Notice that the direction of this is the same as when is radially outwards.
The Velocity And Acceleration Of A Piston By Analysis
In the following analysis is the uniform angular velocity of the crank. The positive direction of velocity and acceleration is away from the crankshaft.
Normally can be neglected in comparison with and equations (6) and (7) can be reduced as follows:
Instantaneous Centre Method For Velocities.
This has been covered in the section on Mechanisms.
The Vector Method For Velocity And Acceleration
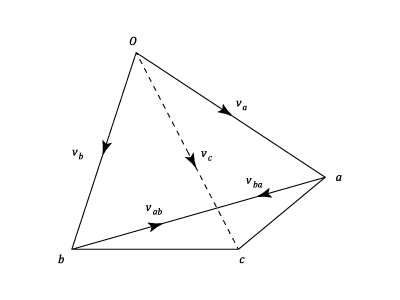
The Law of addition of velocities states that:
Velocity of = Velocity of + Velocity of relative to
i.e.
Absolute velocities (or accelerations) are given from to the corresponding point on the diagram.
For Velocities
The relative velocity between two points and on the same link of a mechanism must be perpendicular to the line joining the points and is equal to (Equation (2))since is constant and is zero.
The relative velocity for two points sliding over one another is along the common tangents of their paths and represents the component , is zero since
For Acceleration
The relationships for acceleration are similar to those given for velocity:
Acceleration of = Acceleration of + Acceleration of relative to
Equations (4) and (5) are the general expressions for the radial and tangential components of relative acceleration.
For two points on the same link leaving centripetal component (which can be calculated when the velocities are determined) and the tangential component
For a uniformly rotating Crank leaving the centripetal as the only term.
The Coriolis component arises when a point on one link is sliding along another link which is itself rotating.
If ,,, are three points on the same link of a mechanism and ,,, are the corresponding points on the velocity (or acceleration) diagram, it can be shown that the triangles
and are similar. is called the Velocity (or acceleration) image of the link.
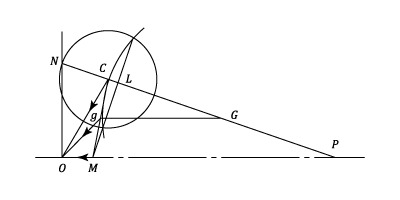
Klein's Construction For Piston Acceleration
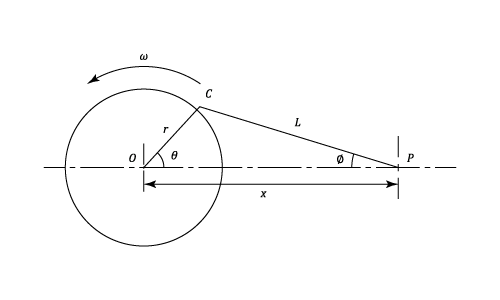
The above is a diagramatic sketch of a piston, connecting rod, and crank assembly where,
is the connecting rod with the Crank Pin.
is the crank.
is the line of stroke.
is the gudgeon pin
The Construction is as follows:
Extend to meet the line through perpendicular to the line of stroke. Let the point of intersection be .
Draw a circle centre and radius .
Draw a circle with as diameter.
Let the common cord cut the line at and the line of stroke at .
Then the quadrilateral represents, to a certain scale, the acceleration diagram for . It can be shown that this scale is .
The Centripetal acceleration of the crank pin is
The piston acceleration is
is the Centripetal component and the Tangential component of the acceleration of relative to , so that is the acceleration image of .
For any point on draw a line parallel to cutting in . The acceleration of is in magnitude and direction.
Example:
[imperial]
Example - Example 1
Problem
An aeroplane flying at 180 m.p.h. in a direction North of West sights another due North of . After 30 seconds flying is seen to be in a North-Easterly direction from and after a further 45 seconds is directly astern of . If is flying at a constant speed in a direction due South, find:
a) The speed of
b) For how long is within 2 miles of
Workings
In the following diagram the Paths of and are shown. Their three particular positions are and respectively.
(30 seconds flying)
By scaling or by calculation and occupies 45 seconds of flying time.
Hence, Speed of =
Relative displacement of to = displacement of - displacement of
i.e.
In the first 30 seconds
Assuming that A is at rest at , the relative path of is produced and a circle centre and of radius 2 miles cuts this path at 1 and . Between 1 and , lies within 2 miles of .
But
This represents 30 seconds of relative displacement
But, Time corresponding to 1 mile =


moves in the plane
. The length
and the
.
 And,
And,
 Differentiating with respect to time :
Differentiating with respect to time :

 ( i.e. in the direction of
( i.e. in the direction of  ) is given by:
And using equations (1) and (2)
) is given by:
And using equations (1) and (2)
 Which is the rate of increase of
Which is the rate of increase of  increasing)
increasing)
 Where
Where  = angular velocity of
= angular velocity of 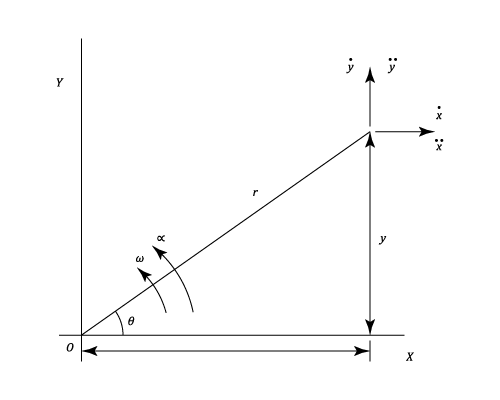

 The Radial components of acceleration
The Radial components of acceleration
 And from equation (3)
The Tangential component of acceleration
And from equation (3)
The Tangential component of acceleration  By substitution:
(Note
By substitution:
(Note  = Angular acceleration of
= Angular acceleration of is the rate of change of radial velocity
is the centripetal acceleration due to the rotation of
is due to the change in angular velocity.
is called the compound supplementary acceleration or Coriolis Component. Notice that the direction of this is the same as
when
and
on the same link of a mechanism must be perpendicular to the line joining the points and is equal to
(Equation (2))since
is constant and
is zero.
leaving centripetal component
(which can be calculated when the velocities are determined) and the tangential component
leaving the centripetal as the only term.
is the connecting rod with
the Crank Pin.
is the crank.
perpendicular to the line of stroke. Let the point of intersection be
.
.
as diameter.
and the line of stroke
at
.
is the Centripetal component and
the Tangential component of the acceleration of
is the acceleration image of
on
. The acceleration of
in magnitude and direction.
 North of West sights another
North of West sights another  and
and  respectively.
respectively.
 (30 seconds flying)
(30 seconds flying)

 and occupies 45 seconds of flying time.
Hence, Speed of
and occupies 45 seconds of flying time.
Hence, Speed of  Relative displacement of
Relative displacement of  In the first 30 seconds
In the first 30 seconds  Assuming that A is at rest at
Assuming that A is at rest at  , the relative path of
, the relative path of  produced and a circle centre
produced and a circle centre  . Between 1 and
. Between 1 and  But
But  This represents 30 seconds of relative displacement
But, Time corresponding to 1 mile =
This represents 30 seconds of relative displacement
But, Time corresponding to 1 mile = 